Close loop active flow separation control on a 2-elelment high-lift deivce. Active flow control using pulsed jet was used to delay flow separation on a 2-element high-lift device. Wind tunnel test results show that 20% lift enhancement can be achieved by using a novel positional based iterative learning control algorithm.
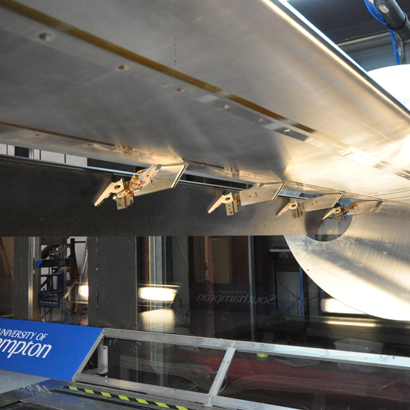
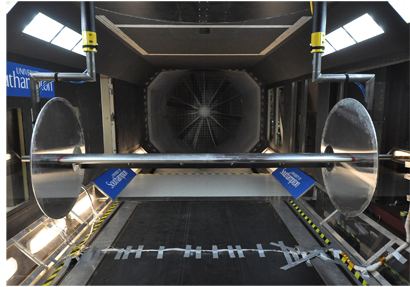
In this work, active flow control by using pulsed air jet was investigated in order to delay flow separation on a two-element high-lift wing. A novel iterative learning control (ILC) algorithm was presented which uses position based pressure measurements to update the actuation repeatedly. The method was experimentally tested on the mid-scale DLR F15 wing model in the R. J. Mitchell wind tunnel at the University of Southampton. Compressed air and fast switching solenoid valves were used as actuators to excite the flow and the pressure distribution was measured as a feedback control signal for the ILC controller. Experimental results showed that the actuation was able to delay the separation and increase the lift by approximately 15-20%. By using ILC algorithm, the controller was able to track the target lift and using the optimum control algorithm and extended reference, the controller was able to find the maximum lift improvement.